


要说现在制造业什么最火?
答案一定非“人工智能”莫属了
而人工智能的火热
也带火了与之关系密切的机器视觉
如果说“人工智能”是一个人的大脑的话
那机器视觉就是这个人的眼睛

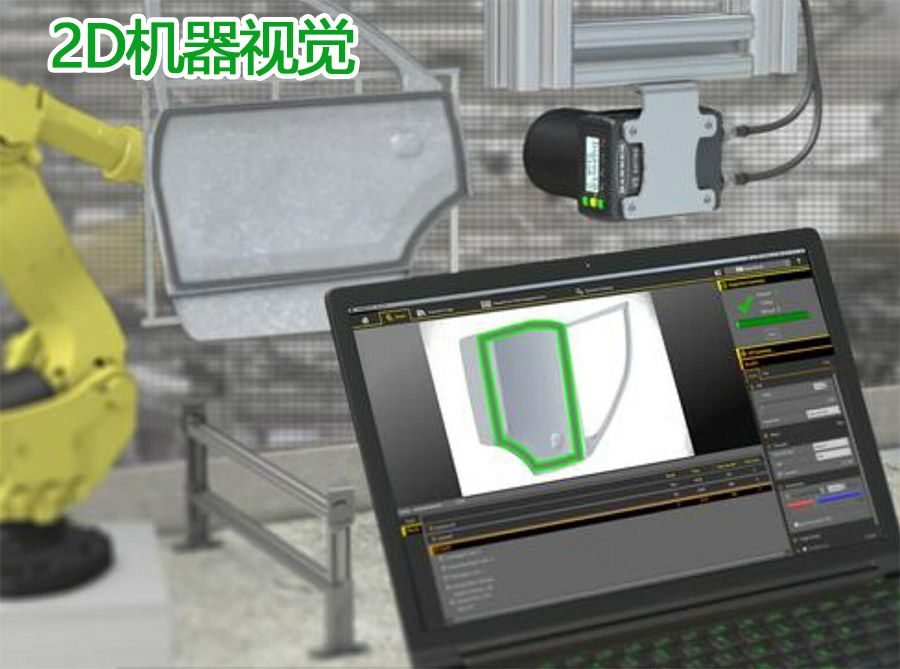
以前我们所说的机器视觉
通常是指2D的视觉系统
即通过摄像头拍到一个平面的照片
然后通过图像分析或比对来识别物体
能看到物体一个平面上特征
可用于缺失/存在检测、离散对象分析
图案对齐、条形码和光学字符识别
以及基于边缘检测的各种二维几何分析
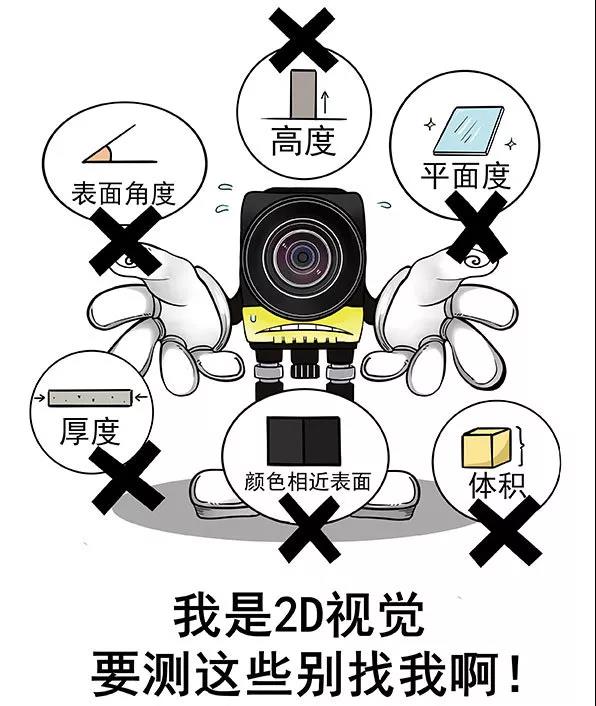
由于2D视觉无法获得物体的空间坐标信息
所以不支持与形状相关的测量
诸如物体平面度、表面角度、体积
或者区分相同颜色的物体之类的特征
或者在具有接触侧的物体位置之间进行区分
而且2D视觉测量物体的对比度
这意味着特别依赖于光照和颜色/灰度变化
测量精度易受变量照明条件的影响
因此,随着现在对精确度和自动化的要求越来越高
3D机器视觉变得更受欢迎
在许多“痛点型应用场景”中大显身手
成为当前“智”造业最炙手可热的技术之一
业界认为2D向3D的转变将成为
继黑白到彩色、低分辨率到高分辨率
静态图像到动态影像后的第四次革命
3D视觉将是人工智能“开眼看世界”的提供者!
相比2D
3D机器视觉具有以下优点
① 在线检测快速移动的目标物,获取形状和对比度
② 消除手动检查带来的错误
③ 实现部件和装配的100%在线质量控制
④ 最大限度地缩短检测周期和召回
⑤ 最大限度地提高生产质量和生产量
⑥ 对比度不变,是检查低对比度物体的理想选择
⑦ 对较小的照明变化或环境光不敏感
⑧ 建立大型物体检测的多传感器设置更简单
正是因为有这么多的优势
3D机器视觉在业界越来越火热
可是,你对它了解多少呢?
其实,要想真正了解3D视觉
首先得了解3D视觉的测量原理
目前市场上主流的有四种3D视觉技术
双目视觉、TOF、结构光和激光三角测量
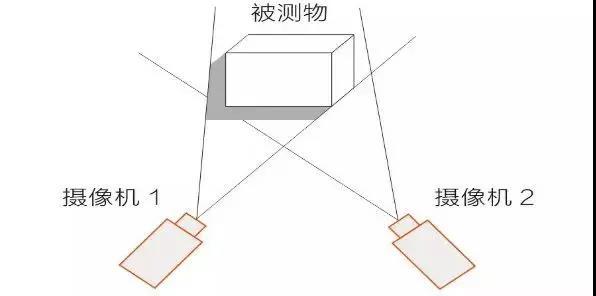
双目技术是目前较为广泛的3D视觉系统
它的原理就像我们人的两只眼睛
用两个视点观察同一景物
以获取在不同视角下的感知图像
然后通过三角测量原理计算图像的视差
来获取景物的三维信息
由于双目技术原理简单
不需要使用特殊的发射器和接收器
只需要在自然光照下就能获得三维信息
所以双目技术具有
系统结构简单、实现灵活和成本低的优点
适合于制造现场的在线、产品检测和质量控制
不过双目技术的劣势是算法复杂,计算量大
而且光照较暗或者过度曝光的情况下效果差
第二个技术是TOF飞行时间法成像技术
TOF是Time Of Flight的简写
它的原理通过给目标物连续发送光脉冲
然后用传感器接收从物体返回的光
通过探测光脉冲的飞行时间来得到目标物距离
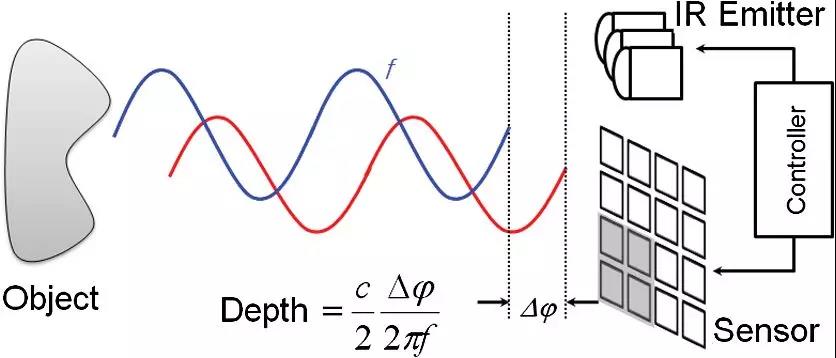
TOF的核心部件是光源和感光接收模块
由于TOF是根据公式直接输出深度信息
不需要用类似双目视觉的算法来计算
所以具有响应快、软件简单、识别距离远的特点
而且由于不需要进行灰度图像的获取与分析
因此不受外界光源物体表面性质影响
不过TOF技术的缺点是
分辨率低、不能精密成像、而且成本高
由于双目和TOF都有各自的缺点
所以就有了第三种方式
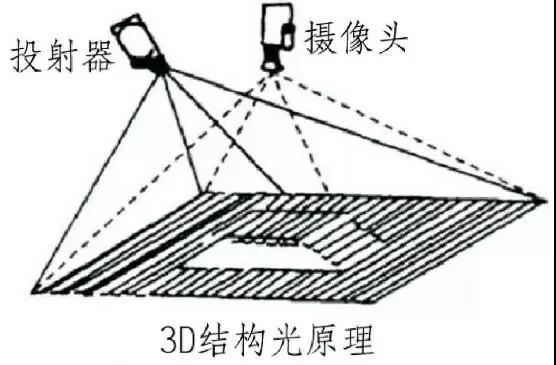
——3D结构光技术
它通过一个光源投射出一束结构光
这结构光可不是普通的光
而是具备一定结构(比如黑白相间)的光线
打到想要测量的物体上表面
因为物体有不同的形状
会对这样的一些条纹或斑点发生不同的变形
有这样的变形之后
通过算法可以计算出距离、形状、尺寸等信息
从而获得物体的三维图像
由于3D结构光技术
既不需要用很精准的时间延时来测量
又解决双目中匹配算法的复杂度和鲁棒性问题
所以具有计算简单、测量精度较高的优势
而且
对于弱光环境、无明显纹理和形状变化的表面
同样都可进行精密测量
所以越来越多的3D视觉高端应用采用结构光技术
最后一种是和结构光类似的激光三角测量法
它基于光学三角原理
根据光源、物体和检测器三者之间的几何成像关系
来确定空间物体各点的三维坐标
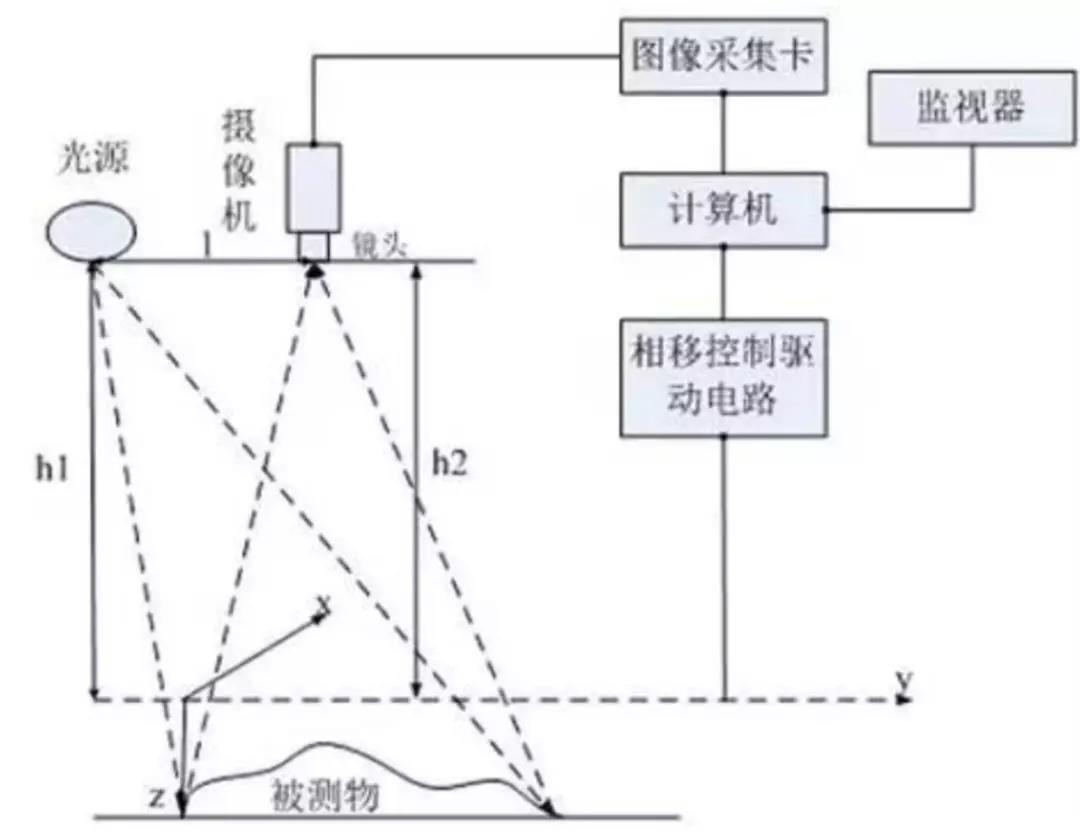
通常用激光作为光源,用CCD相机作为检测器
具有结构光3D视觉的优点
精准、快速、成本低
不过
由于根据三角原理计算
被测物体越远
在CCD 上的位置差别就越小
所以三角测量法在近距离下的精度很高
但是随着距离越来越远
其测量的精度会越来越差
对于这四种3D视觉原理各自的优缺点
我们可以简单总结为以下的表格
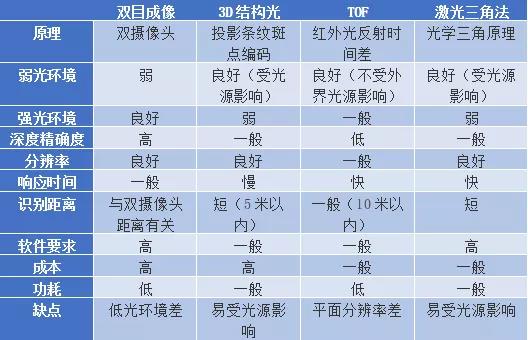
从上面的表格可以看出
四种主流的3D视觉测量原理都有各自的优缺点
那么
对于可靠性和精度要求极高的制造业来说
有没有将几种测量原理结合一起的3D视觉呢?
其实全球顶尖的3D视觉厂商也想到了这样的方案
比如专注于三维视觉40多年的
LMI Technologies公司
就有一款采用双目+结构光设计的3D视觉传感器
——Gocator® 3504

XY方向分辨率达6.7μm、Z方向精度达0.2μm
一次快照即可实现高精度3D表面和几何检测
可以检测到小型电子元器件的微小特征
可以达到计量等级的精度和准确度
在高速在线检测过程中实现100%的质量控制
它的测量原理图如下
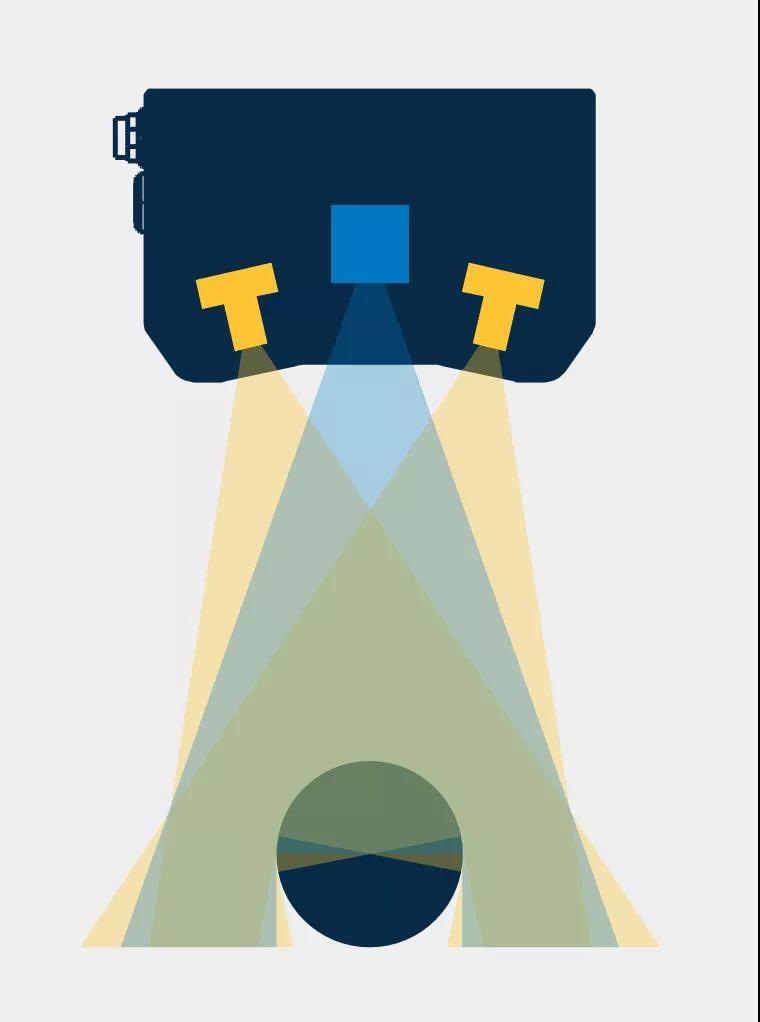
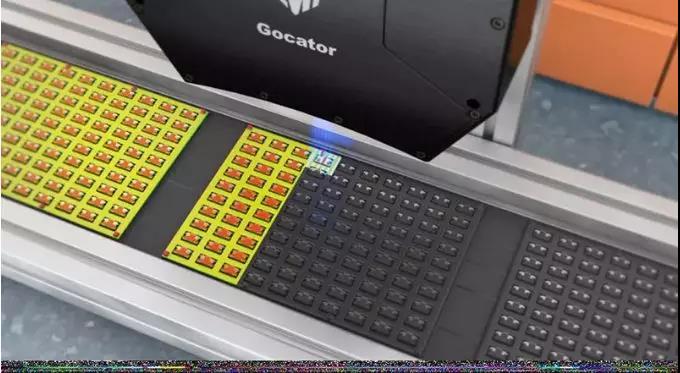
我们不妨通过Gocator® 3504来看看
3D视觉的应用优势

应用一:芯片上的微型条形码检测

应用二:铜线圈检测
应用三:连接器引脚检测
可以看到,
在这些精确度要求极高的场合
普通2D机器视觉是无法满足要求的
看到这里
你可能会问
那对于像手机玻璃表面、金属、透明材料
这些高反光表面
这些2D视觉基本无能为力的检测场合
3D视觉有没有办法解决呢?
Of course!
这也是3D视觉的一大特点!
还是以LMI Technologies的一款3D视觉来说明
这款产品型号是Gocator® 2500系列
这是一款高速3D线激光轮廓传感器
采用蓝色激光+定制光学设计
集扫描、测量和控制于一体,无需额外控制器
内置丰富的测量算法
特别适合低对比度和高反光目标物的测量
并针对微小零部件的应用特别优化
重点专注于消费电子行业。
扫描速度最高可达10 kHz
在线生产达到微米级别分辨率
下面是它的一些典型应用场合
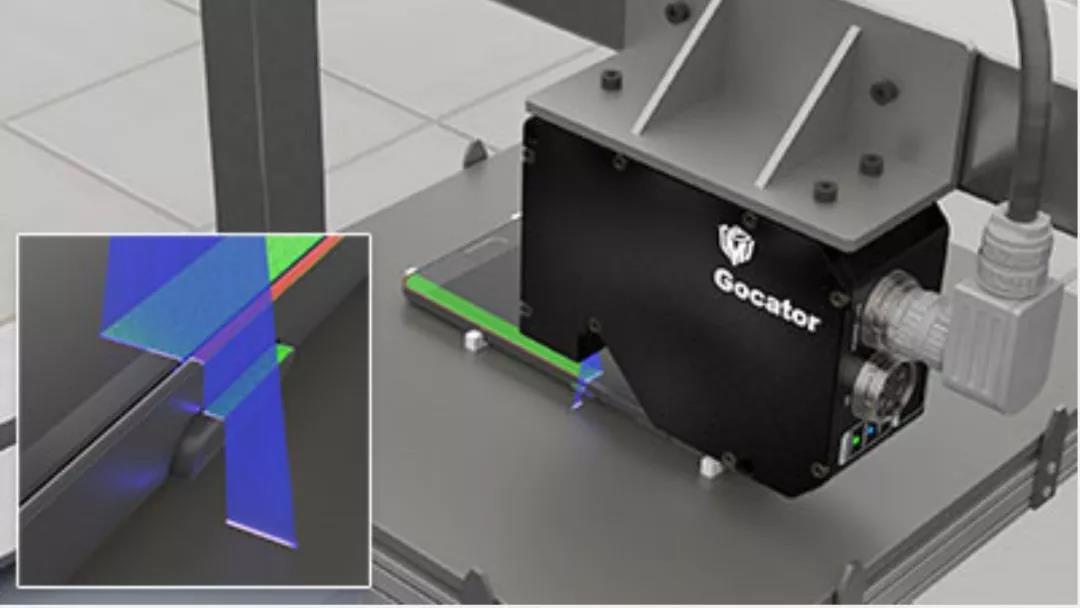
手机间隙和面差检测
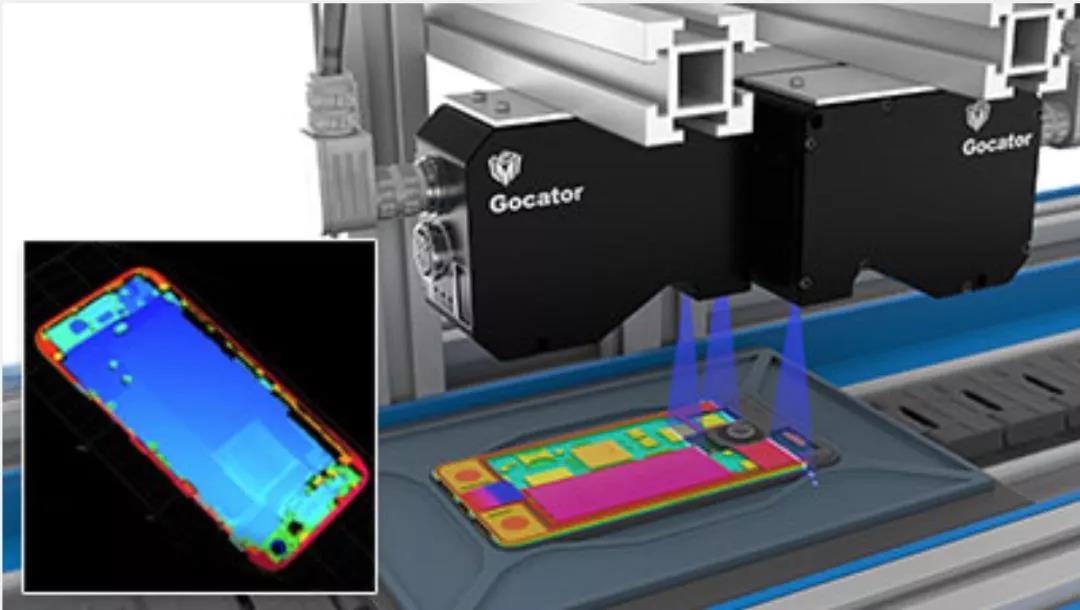
手机部件验证
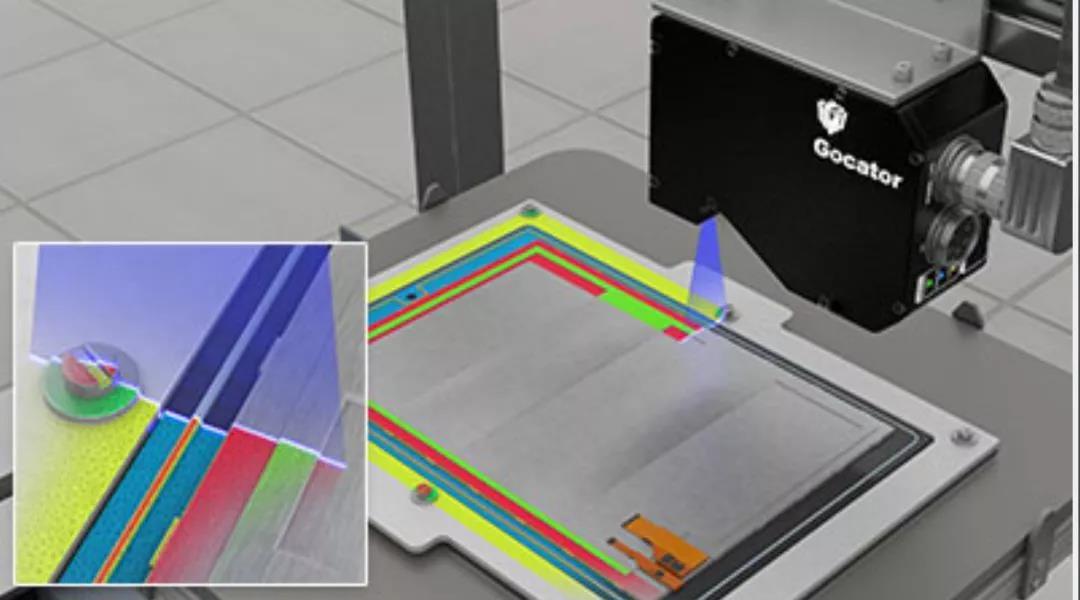
胶路检测

同时扫描镜面和漫反射目标物
怎么样?
看了今天关于3D视觉的介绍
是不是觉得3D视觉确实比2D要厉害多了!
其实,纵观行业发展
2D视觉虽为当前主流
但随着测量精度要求越来越高
被测物体条件越来越复杂
2D系统的缺陷也愈发突出
而3D视觉技术不断获得突破
在精度、灵活性和速度方面都是2D无可比拟的
所以3D机器视觉检测有取代2D系统的趋势
相信3D视觉未来将成为主流视觉系统
3D机器视觉来了,而你准备好了吗?
文章来源:新机器视觉
免责声明:本文系网络转载,版权归原作者所有。但因转载众多,无法确认真正原始作者,故仅标明转载来源。本文所用视频、图片、文字如涉及作品版权问题,请第一时间告知,我们将根据您提供的证明材料确认版权并按国家标准支付稿酬或立即删除内容!本文内容为原作者观点,并不代表本公司赞同其观点和对其真实性负责。

 40088-69-269
40088-69-269